คําอธิบายสินค้า:
องค์ประกอบเรดาร์คลื่นมิลลิเมตรประกอบด้วยสามส่วนหลัก: หน่วยความถี่วิทยุ, หน่วยประมวลผล, และแอนเทนน์พับบอร์ดราดาร์ประเภทนี้ มีความสามารถพิเศษ ในการตรวจจับเป้าหมาย ผ่านอุปสรรคต่างๆ เช่น ฝนราดาร์คลื่นมิลลิเมตรยังสามารถอวดความสามารถในการบูรณาการสูง, ขนาดเล็ก, และอินเตอร์เฟซยืดหยุ่น
ราดาร์วัดระดับ (level meter radar) ใช้เทคโนโลยีราดาร์คลื่นมิลลิเมตร และวัดความสูงของแอนเทนเน่จากระดับของของเหลวรวมทั้งในแม่น้ํา, ถังน้ําและถัง
โมดูลสําหรับราดาร์สามารถมาจากอุปกรณ์ต่างๆโมดูลระยะทางเรดาร์สามารถใช้ได้ในสภาพการทํางานของภาวะแข็งและของเหลว และทํางานด้วยการสนับสนุนชิปความถี่สูง 80Gการตั้งค่าแอนเทนเน่ของเลนส์ยังสามารถปรับปรุงให้กับสภาพแวดล้อมที่แตกต่างกันได้
โดยรวมแล้ว ผลิตภัณฑ์นี้มีประโยชน์สูงในอุตสาหกรรมหลายสาขา เช่น วิศวกรรมอนุรักษ์น้ํา โรงงานบํารุงน้ําเสีย และโรงงานเคมีน้ํามัน
ลักษณะ:
● การรวมตัวกันสูง
● ขนาด เล็ก
● อินเตอร์เฟสที่ยืดหยุ่น
● สามารถ ตรวจ หวย ได้ ผ่าน อุปสรรค เช่น แสง, ฝน, ฝุ่น, คอก หรือ หนาวแข็ง
● เซ็นเซอร์ ขนาด เล็ก ที่ ทํา งาน ตลอด วัน
ปริมาตรเทคนิค:
| เลขรุ่น |
KLM800_485 |
| ความถี่ของการวัด |
80GHz |
| วิธีการสื่อสาร |
RS_485 |
| ความถี่ของการซื้อ |
160 ms/สามารถตั้งค่าได้ |
| กระแสการทํางาน |
12V 30MA |
| ความแม่นยําในการวัดระยะทาง |
± 2 มม. |
| ระเบียบสื่อสาร |
modbus |
| ความกว้างของรังสีแอนเทนนา |
±2.75° |
| ความดันไฟฟ้า |
9-24V |
| ระยะการวัด |
3m; 10m; 20m; 40m |
| มิติของโมดูล |
กว้าง 47 มม
กว้าง 64 มม
|
| ความชื้นในการทํางาน |
0~95% |
| อุณหภูมิการทํางาน |
-20 ~ 70 °C |
ขนาด:

การใช้งาน:
● การ สํารวจ น้ํา แม่น้ํา สระ และ น้ํา อื่น ๆ
● การวัดระดับถังและระดับน้ํา
● โครงการ ประหยัด น้ํา
● แผน การ บําบัด น้ําเสีย
● โรงงาน เคมี น้ํามัน
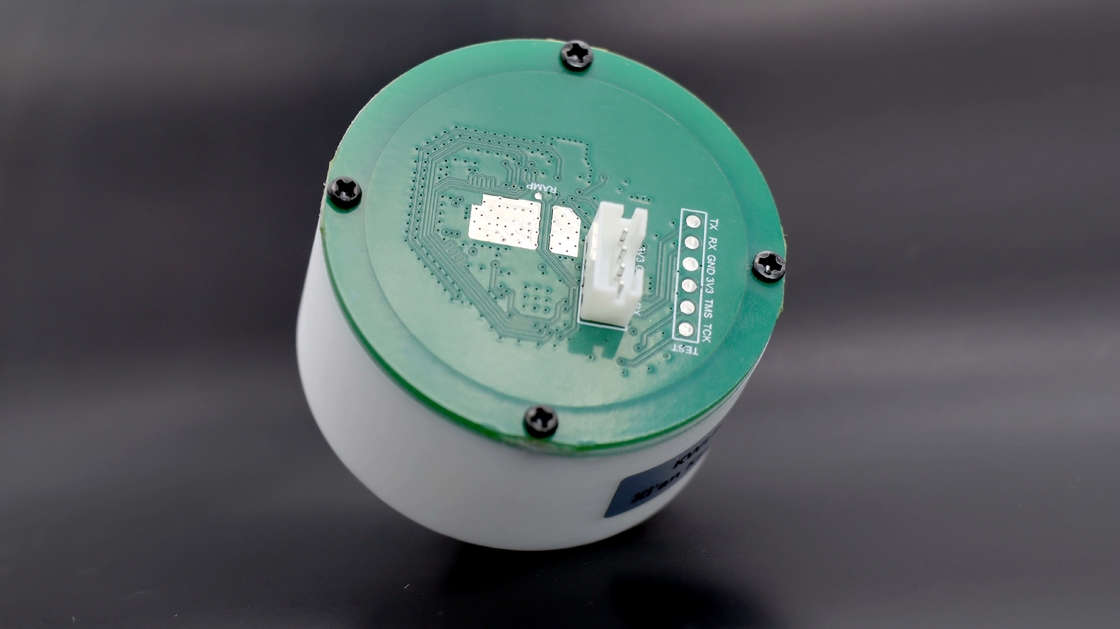
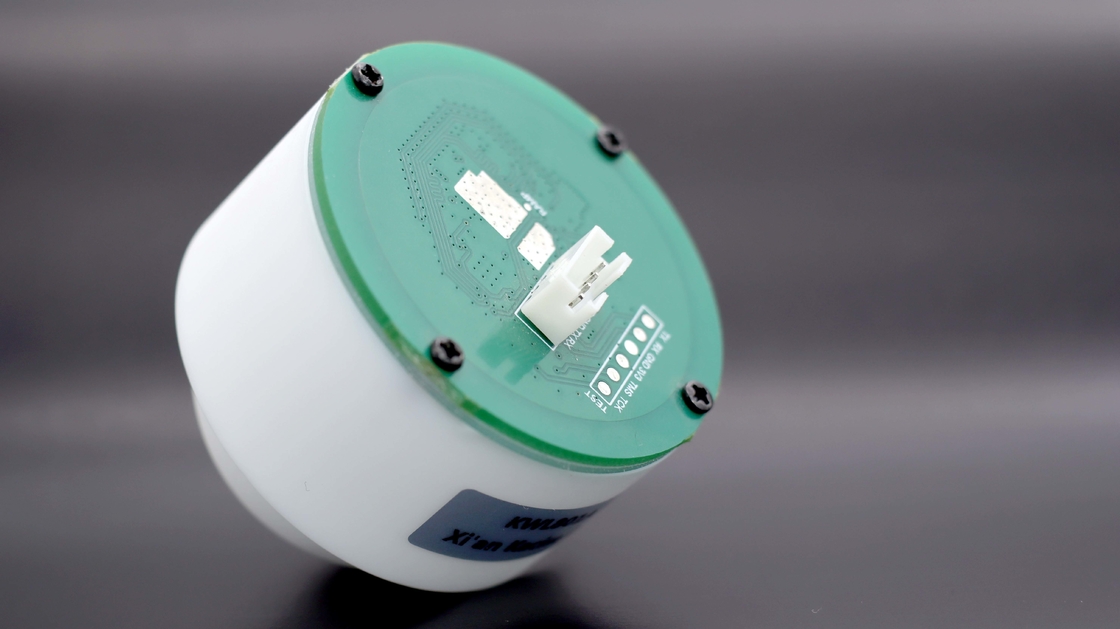
การจําหน่ายพลังงานและการสื่อสาร
อินเตอร์เฟซของโมดูลแสดงในรูปต่อไปนี้
| อินเตอร์เฟซ |
ชื่อ |
หน้าที่ |
| 1 |
ถอดปาก |
สําหรับการปรับปรุงฟอร์มแวร์ STLINK และการแก้ปัญหาการจําลอง |
| 2 |
สายพานไฟฟ้า |
3.3 วอลต์ พลังงานไฟฟ้า GND |
| 3 |
Port ซีเรียล |
ใช้ในการออกคําสั่งเวลา |
คําแนะนําการติดตั้งอุปกรณ์
เมื่อติดตั้งโมดูล พยายามให้มันคงไว้เพื่อหลีกเลี่ยงการกระแทกของโมดูล และให้สิ่งแวดล้อมรอบตัวเปิดให้มากที่สุด
1ระยะห่างระหว่างโมดูลและพื้นผิวน้ําสูงกว่า 30 ซม. เพื่อให้แน่ใจว่าหน้าหน้าของโมดูล (พื้นผิวแอนเทนน่า) ตรงกับระดับของเหลวในการวัด
2ระยะทางระหว่างโมดูลและขอบของถัง ขอบของสระว่ายน้ํา ขอบของเขื่อนแม่น้ําและขอบของสระว่ายน้ํามากกว่า 1 เมตร
3. เลือกที่ตั้งของโมดูลการติดตั้งที่ไม่ค่อยอ่อนแอ (พยายามที่จะไม่ติดตั้งในประตูฉีดและการออกคลื่นใหญ่,ยิ่งแย่ลง).
4ภาพแผนการติดตั้ง
การรับประกันภายในเขตของรังโดยไม่มีความสับสน เช่น ธารธานของแม่น้ํา
ข้อสังเกต
การติดตั้งโมดูลเพื่อรักษาคงที่เท่าที่จะเป็นไปได้ หลีกเลี่ยงโมดูล jitter สิ่งแวดล้อมรอบ ๆ ให้เปิดมากเท่าที่จะเป็นไปได้
1ระยะห่างระหว่างโมดูลและพื้นผิวน้ําสูงกว่า 30 ซม. เพื่อให้แน่ใจว่าหน้าด้านหน้าของโมดูล (พื้นผิวแอนเทนน่า) ตรงกับระดับของเหลวในการวัด
2. ระยะทางระหว่างโมดูลและขอบของถัง, ขอบของสระ, ขอบของเขื่อนแม่น้ําและขอบของสระมากกว่า 0.5 เมตร
3. เลือกที่ตั้งของโมดูลการติดตั้งที่ลดความผันผวน (พยายามที่จะไม่ติดตั้งในประตูฉีดและการออกคลื่นใหญ่คลื่น, ความแม่นยําของการวัดที่ใหญ่ยิ่งแย่กว่า))
โปรต็อกอลการสื่อสารสายพานลําดับ
| หัวกรอบ (1B) |
0XFF |
| การวัดการปลด (4B) |
การวัดความสูง (ชนิดจุดลอย, ในเซนติเมตร) |
| ตรวจสอบและ (1 b) |
ผลการวัดถูกกลม และบายท์สูงและบายท์ต่ําถูกรวมกัน และบายท์ต่ําถูกนําเป็น checksum |
ตัวอย่างเช่น ข้อมูลที่ส่งคือ FF 2A 4B 90 42 47, โดย FF เป็นหัวกรอบ, 4 ไบท์กลาง "2A 4B 90 42" เป็นข้อมูลระยะทาง,และปลายขนาดตั้งข้อมูลจริงของมันเป็น 42 90 4B 2A (ชนิดจุดลอย hexadecimal), ซึ่งแปลงเป็น 72.1468 ซม.
47 เป็นยอดตรวจคํานวณดังนี้
เป็นคนแรกที่แปลงระยะห่างของจุดพุ่ง 72.1468 uint32_t integer (4 bytes) เป็น 72, ในระดับต่ําในสองไบท์ 0 (HEX 0), ต่ําของ 72 (HEX 48) เป็น checksum ต่ําของหัวกรอบhigh + integer integer เพื่อเอา 8 บิตต่ํา, (FF + 0 x00 + 0 x48) & 0 x47 x00ff = 0
เพิ่ม: SScom แบบทดสอบ
สามารถทดสอบด้วยการใช้พอร์ตลําดับเพื่อช่วย (มือ SScom)
1. ใช้โมดูลพอร์ต USB ซีเรียลเชื่อมต่อกับคอมพิวเตอร์อินเตอร์เฟซ USB เปิด SSCOM ซีเรียลซอฟต์แวร์การแก้ไขปัญหา, การเลือก
ท่าเรือที่ถูกต้อง
2.ส่ง AT + TLVS = 1 n, เพื่อแปลงเชือกผลิต, ตามส่งคําสั่ง
"AT + START n"
3. string การออก
หมายเหตุ: อัตราการใช้ค่าบอดต์แบบตั้งค่าเป็น 9600 หากคุณเปิดสตริงโดยไม่มีด้านขวาของ SSCOM คลิกต่อขยายทางด้านขวาของ "Save Parameters" เพื่อแสดงมัน
| รายละเอียดการใช้งานทั่วไป |
|
| AT+STARTn |
เริ่มการสั่งการ |
| AT+RESETn |
กําหนดการรีเซ็ตคําสั่ง |
| AT+BAUD=9600n |
คําสั่ง Baud rate |
| AT+TIME = 160n |
ระยะรอบ (คือเปลี่ยนระยะเวลาผลิต) |
| AT+READn |
ตรวจสอบว่าการตั้งค่าทั่วไปถูกต้อง |
| AT+TLVS=1n |
เปลี่ยนผลิต (ค่าธรรมเนียมคือ 0 ใน hexadecimal) |
หมายเหตุ:
ในสภาพการทํางานของ MCU, เพื่อตั้งค่า, เริ่มต้นส่งคําสั่งรีเซ็ต (หยุดงาน), ปรับแต่งคําสั่ง input, จากนั้นส่งคําสั่งรีเซ็ต (ทําให้การตั้งค่ามีประสิทธิภาพ),และส่งคําสั่งเริ่มต้น.
โปรต็อกอลสื่อสาร MODBUS RTU
1.คําแนะนําการติดตั้ง: รหัสฟังก์ชัน 0 x 10
(1)Restore การตั้งค่าโรงงาน
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x10 |
0x10 00 |
0x00 01 |
0x02 |
0x00 00 |
0x9E 33 |
การกําหนดข้อมูล: 0 เพื่อรีสโฟร์การตั้งค่าโรงงาน 1 เพื่อรีสโฟร์โปรแกรม
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x10 |
0x10 00 |
0x00 01 |
0x0F 17 |
ตัวอย่าง:
คําขอ: 7f 10 10 00 00 02 00 00 9 e 33 01
ตอบ: 7 f 10 10 00 00 0 f 17 01
ในกรณีที่ข้อมูลส่วน 00 00 หมายถึงการฟื้นฟูการตั้งค่าโรงงาน
(2) จากที่อยู่ของเครื่อง
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x10 |
0x20 01 |
0x00 01 |
0x02 |
0x00 01 |
0x6E 21 |
การนิยามข้อมูล: ระยะค่า 1--247.
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x10 |
0x20 01 |
0x00 01 |
0x51 D7 |
ตัวอย่าง:
คําขอ: 7F 10 20 01 00 01 02 00 01 6E 21
ตอบ: 7f 10 20 01 00 01 51 D7
ส่วนข้อมูล 00 01 แสดงว่าที่อยู่ของ slave ตั้งค่าเป็น 1
(3) ระยะการวัด
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x10 |
0x20 46 |
0x00 02 |
0x04 |
0x00 00 41 30 |
0x40 19 |
คํานิยามข้อมูล: ค่าข้อมูลคือ Float data, หน่วยคือเมตร, ค่าความยาวของข้อมูลคือ 4 ไบท์, รูปแบบข้อมูลคือ ขนาดต่ํา 16 บิตของข้อมูลในด้านหน้า, ขนาดสูง 16 บิตของข้อมูลในด้านหลัง
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x10 |
0x20 46 |
0x00 02 |
0xA1 C3 |
ตัวอย่าง:
คําขอ: 7 46 00 02 04 f 10 20 00 00 41 30 ถึง 40 19
Re: 7F 10 20 46 00 02 A1 C3
00 00 41 30 ซึ่งส่วนของข้อมูลของข้อมูลตัวอักษรลอยที่ 11 เมตร
(4) วัดระยะเวลา
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x10 |
0x20 2E |
0x00 01 |
0x02 |
0x03 E8 |
0xA8 C0 |
การกําหนดข้อมูล: กําหนดระยะเวลาในการรวบรวมข้อมูลของเครื่องวัดระดับน้ํา, หน่วย ms, และค่าขั้นต่ําคือ 100 ms
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x10 |
0x20 2E |
0x00 01 |
0x60 1E |
ตัวอย่าง:
คําขอ: 7 2 e f 10 20 00 02 03 01 E8 A8 C0
ตอบ: 7F 10 20 2E 00 01 60 1E
ในหมู่พวกเขา ส่วนข้อมูล 03 E8 เปลี่ยนแปลงเป็นหลักทศนิยม 1000 นั่นก็คือ ระยะเวลาการเก็บข้อมูลถูกตั้งเป็น 1000 ms
(5)อัตราการสื่อสาร
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x10 |
0x20 02 |
0x00 01 |
0x02 |
0x25 80 |
0xB4 E2 |
ความหมายของข้อมูล: อัตราการสื่อสาร: 48009600,19200.
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x10 |
0x20 02 |
0x00 01 |
0xA1 D7 |
ตัวอย่าง:
คําขอ: 7 f 10 20 00 02 01, 02, 25 80 B4 E2
ตอบ: 7F 10 20 02 00 01 A1 D7
ส่วนข้อมูล 28 80 หมายความว่าอัตราการสื่อสาร baud ได้ตั้งเป็น 9600
2คําสั่งการสอบถาม: รหัสฟังก์ชัน 0x03
(1)จากที่อยู่ของเครื่อง
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x03 |
0x20 01 |
0x00 01 |
0xD4 14 |
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x03 |
0x02 |
0x00 01 |
0x51 8E |
การนิยามข้อมูล: ระยะค่า 1--247.
ตัวอย่าง:
คําขอ: 7f 03 01 00 20 01 D4 14
ตอบ: 7f 03 02 0 01 51 8 e
ส่วนข้อมูล 00 01 หมายถึงที่อยู่ของ slave คือ 1
(2) ความสามารถในระยะ
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x03 |
0x20 46 |
0x00 02 |
0x24 00 |
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x03 |
0x04 |
0x00 00 41 30 |
0x54 70 |
คํานิยามข้อมูล: ค่าข้อมูลคือ Float data, หน่วยคือเมตร, ค่าความยาวของข้อมูลคือ 4 ไบท์, รูปแบบข้อมูลคือ ขนาดต่ํา 16 บิตของข้อมูลในด้านหน้า, ขนาดสูง 16 บิตของข้อมูลในด้านหลัง
ตัวอย่าง:
คําขอ: 7 46 f 03 20 00 00 02 24
ตอบ: 7f 03 04 00 00 41 30 54, 70
ส่วนข้อมูล 00 00 41 30 เปลี่ยนแปลงเป็นข้อมูลตัวอักษรลอย ซึ่งเท่ากับ 11 เมตร
(3) อัตราการสื่อสาร
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x03 |
0x20 02 |
0x00 01 |
0x24 14 |
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x03 |
0x02 |
0x28 80 |
0x8D 7E |
ตัวอย่าง:
คําขอ: 7f 20 00 02 03 01 24 14
Re: 7F 03 02 25 80 8B 7E
ส่วนข้อมูล 28 80 หมายถึงอัตราการสื่อสารเป็น 9600 บาวด์
(4) วัดระยะเวลา
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x03 |
0x20 2E |
0x00 01 |
0xE5 D0 |
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x03 |
0x02 |
0x03 E8 |
0x90 F0 |
การกําหนดข้อมูล: กําหนดระยะเวลาในการรวบรวมข้อมูลของเครื่องวัดระดับน้ํา, หน่วย ms, และค่าขั้นต่ําคือ 100 ms
ตัวอย่าง:
คําขอ: 7F 03 20 2E 00 01 EF C3
ตอบ: 7 f 03 02 90 F0 03 E8
ในหมู่พวกเขา ส่วนข้อมูล 03 E8 ได้ถูกแปลงเป็นหลักสิบ 1000 แสดงว่าระยะเวลาการเก็บข้อมูลคือ 1000 ms
(5) ผลการวัดคําถาม
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x04 |
0x0A 0F |
0x00 02 |
0x48 0E |
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x04 |
0x04 |
0x04 19 3F 9E |
0x25 2C |
ความหมายของข้อมูล: ค่าข้อมูลคือข้อมูลประเภท Float, หน่วยคือเมตร ค่าความยาวของข้อมูลคือ 4 ไบท์, รูปแบบข้อมูลสําหรับข้อมูล 16 บิตต่ําในครั้งแรก, ข้อมูล 16 บิตสูงด้านหลังความหมายของผลการวัดเกี่ยวข้องกับประเภทการวัด, และค่าตั้งค่าคือระดับน้ํา
ตัวอย่าง:
คําขอ: 7 4 0 f a 48 0 0 f 00 02 e
ตอบ: 7 f 04 04 04 19 3 f 9 e 25 2 c
ส่วนข้อมูล 04 19 3F 9E เปลี่ยนแปลงเป็นข้อมูลจุดลอยที่เท่ากับ 1.2345 เมตร
19049 e3f อยู่ที่หนึ่ง ที่สูงตรง
(6) เวอร์ชั่นคําถาม
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0x7F |
0x03 |
0x20 04 |
0x00 02 |
0x48 14 |
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x03 |
0x04 |
0x20 23 05 12 |
0x1D 63 |
ความหมายของข้อมูล: ข้อมูลอยู่ในรูปแบบการโค้ด BCD, 0x20 0x23 0x05 0x12, ซึ่งหมายถึงข้อมูล 20230512.
(7) อุปกรณ์สอบถามที่อยู่การออกอากาศ
คําสั่งขอ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ที่อยู่เริ่มต้น |
จํานวนทะเบียน |
CRC |
| 0xFF |
0x03 |
0x20 01 |
0x00 01 |
0xCB D4 |
ข้อมูลการตอบ:
| ที่อยู่ของเครื่อง |
รหัสฟังก์ชัน |
ความยาวของข้อมูล |
ข้อมูล |
CRC |
| 0x7F |
0x03 |
0x02 |
0x00 7F |
0xD1 AE |
การกําหนดข้อมูล: 0x7F ในข้อมูลคือที่อยู่ 485 ของอุปกรณ์
การสนับสนุนและบริการ:
การสนับสนุนทางเทคนิคและบริการของสินค้าเซ็นเซอร์เร่งของเรารวมถึง:
- การช่วยเหลือในการติดตั้งและการตั้งค่า
- การแก้ไขปัญหาและการวินิจฉัย
- บริการซ่อมแซมและเปลี่ยน
- เอกสารและทรัพยากรทางเทคนิค
การบรรจุและการขนส่ง
การบรรจุสินค้า:
เซ็นเซอร์วัดความเร่ง จะถูกบรรจุในกล่องกระดาษแข็งแรงที่มีวัสดุปรับ เพื่อป้องกันความเสียหายระหว่างการขนส่งกล่องจะติดป้ายด้วยชื่อสินค้าและคําแนะนําการใช้งานที่จําเป็น.
การขนส่ง
ผลิตภัณฑ์จะถูกส่งผ่านการส่งทางพื้นที่มาตรฐาน เว้นแต่การส่งที่เร่งรัดถูกขอและจ่ายโดยลูกค้าค่าจัดส่งจะคํานวณขึ้นอยู่กับจุดหมายและน้ําหนักของพัสดุลูกค้าจะได้รับหมายเลขการติดตาม เมื่อพัสดุถูกส่ง

 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski