คําอธิบายสินค้า
KSMIT3: ระบบอ้างอิงและหัวข้อทัศนคติที่ครอบคลุมตัวเอง
KSMIT3 คือ ระบบอ้างอิงและหัวข้อทัศนคติที่ทันสมัย ที่มาเป็นโมดูลอิสระที่มีฟังก์ชันสมบูรณ์แบบซึ่งทําให้มันง่ายที่จะบูรณาการในระบบใด ๆ.
ระบบนวัตกรรมนี้มีโปรโตคอลการสื่อสารที่มีเอกสารและมาตรฐานของอุตสาหกรรมที่สามารถปรับเปลี่ยนข้อความข้อมูลในแง่ของความถี่ รูปแบบผลิตและข้อมูลสัญญาณถูกประมวลผลทั้งหมดบนบอร์ด, ซึ่งใช้ทรัพยากรในโฮสต์จํานวนน้อยเท่านั้น คุณสมบัตินี้ทําให้ KSMIT3 เหมาะสําหรับการใช้ในสภาพแวดล้อมการทํางาน MCU ง่าย ๆ
KSMIT3 มีความแม่นยําสูงในสภาพแบบไดนามิค ด้วยความแม่นยําในการพลิกและปิ๊ตชิ่ง 1 องศา RMS, รวมถึงความแม่นยําในการบิด 2 องศา RMS. ผลิตของมันมีความมั่นคงสูง,ทําให้มันสมบูรณ์แบบสําหรับการใช้ในการควบคุมและสถาบันของวัตถุใด ๆ หรือการนําทางเช่น เครื่องบินไร้คนขับ
ลักษณะ
● AHRS ที่ทํางานได้อย่างเต็มที่บนโมดูลขนาด 12.1 x 12.1 มิลลิเมตร
● ความแม่นยําของ Flip/PITch (ไดนามิก) 1.0 องศา
● ความแม่นยําของเส้นทาง 2.0 องศา
● ความ จําเป็น ที่ น้อย มาก สําหรับ เครื่องประมวลผล หลัก
● อินเตอร์เฟซที่รวมกันสําหรับรอบชีวิตของสินค้าทั้งหมด
● พลังงานต่ํา (45 mW ที่ 3.0V)
● รองรับกับ PLCC28 PCB (12.1 x 12.1 x 2.6 มม.)
ปริมาตรเทคนิค
| รายการ |
ปารามิเตอร์ (มูลค่าทั่วไป) |
| ทัศนคติ ถูกต้อง |
ความแม่นยําของ Yaw (ไดนามิก) |
2 องศา (rms) |
| ความแม่นยําของ Roll/PITch (ไดนามิก) |
1 องศา (rms) |
| กายโรสโกป |
ขนาดเต็ม |
± 2000°/วินาที |
| ความเสถียรในช่วงการทํางาน |
10°/h |
| ไม่เชิงเส้น |
00.1% |
| ความแตกต่างของปัจจัยขนาด |
00.05% |
| g-SENSITITY ความรู้สึก |
0.1°/s/g |
| ความหนาแน่นของเสียง |
00.01o/s/√Hz |
| ความกว้างแบนด์บิด (-3dB) |
180Hz |
| เครื่องวัดความเร็ว |
ขนาดเต็ม |
± 16 กรัม |
| ความเสถียรในช่วงการทํางาน |
0.1 มิลลิกร |
| ไม่เชิงเส้น |
00.5% |
| ความแตกต่างของปัจจัยขนาด |
00.05% |
| ความหนาแน่นของเสียง |
200 μg/√Hz |
| ความกว้างแบนด์บิด (-3dB) |
180 |
| เครื่องวัดแม่เหล็ก |
ขนาดเต็ม |
6 กาอส |
| ไม่เชิงเส้น |
00.1% |
| การแก้ไข |
120uguss |
| เสียง (rms) |
50ugauss |
| อินเตอร์เฟซ |
ความดันไฟฟ้า |
3.3v DC |
| การสื่อสารสายพานลําดับ |
TTL |
| ความถี่การออก |
ความเร็ว 100hz@230400 baud |
กรอบอ้างอิง
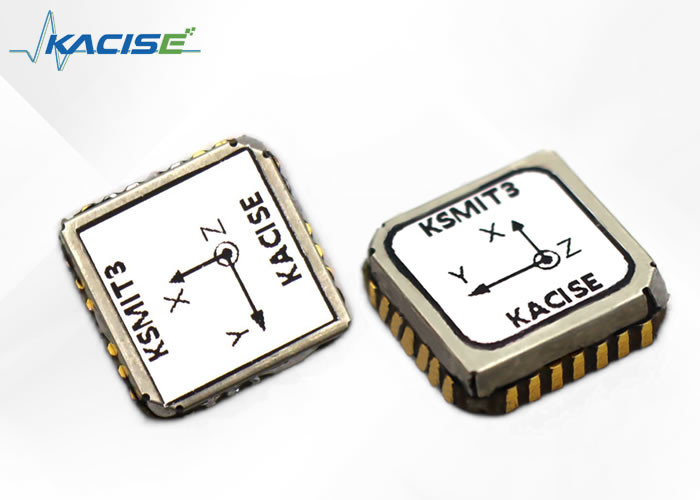
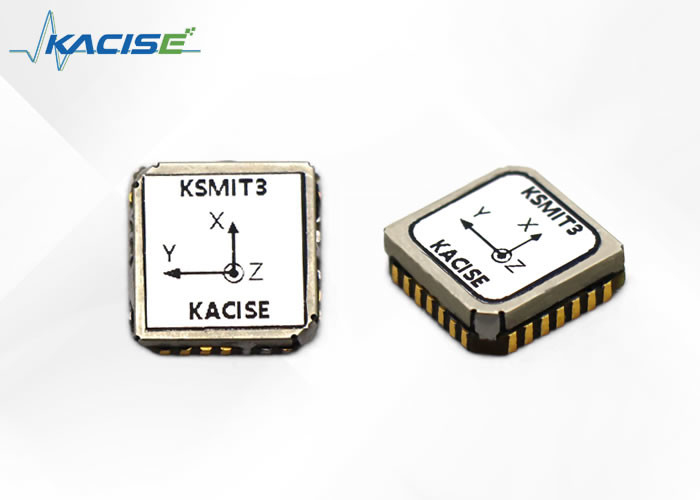
KSMIT3 ใช้ระบบพิกัดขวา และกรอบเซ็นเซอร์แบบตั้งค่าถูกกําหนดตามที่แสดงในรูปที่ 13 สําหรับตําแหน่งที่แม่นยําของแหล่งกําเนิดกรอบเซ็นเซอร์ดูคู่มือการบูรณาการฮาร์ดแวร์บางในผลิตข้อมูลที่ใช้กันทั่วไปกับระบบพิกัดอัตรามาตรฐานผลิตของพวกเขาถูกนําเสนอในรูป 1
 รูปที่ 1 ระบบพิกัดคงที่เซ็นเซอร์แบบปกติสําหรับโมดูล KSMIT3
รูปที่ 1 ระบบพิกัดคงที่เซ็นเซอร์แบบปกติสําหรับโมดูล KSMIT3
ระเบียบสื่อสารผู้ใช้
อัตราบอดคือ 115200bps, 230400bps, และ 460800bps. ข้อมูล bit 8, หยุด bit 1, ไม่มีตรวจสอบ bit. ไบท์สูงมาก่อนและไบท์ต่ํามาสุดท้าย. ความถี่การอัพเดทข้อมูล f=100Hzอัตราการสื่อสารแบบปกติคือ 230400 บีบีซี.
| จํานวนไบท์ |
ชื่อ |
ประเภทไบท์ |
แม็กนิฟี่-คาชั่น |
ระยะทาง |
ไม่IT |
คําอธิบาย |
| 1 ~ 2 |
เฟรมเฮดเตอร์ |
ยู2 |
|
|
|
0XAA 71 |
| 3 |
เลขรูปแบบกรอบ |
ค่าคงที่ 3=0x03 |
| 4 |
ความยาวของกรอบการสื่อสาร |
ค่าคงที่ 100=0x64 |
| 5 ~ 13 |
ไจโร |
S3*3 |
1e-4 |
±8388608 |
°/s |
X/Y/Z ขวา/หน้า/บน |
| 14 ~ 22 |
อัคค |
S3*3 |
1e-5 |
± 8388608 |
g |
X/Y/Z ขวา/หน้า/บน |
| 23 ~ 28 |
แม็ก |
S3*2 |
1e-2 |
± 32768 |
uT |
X/Y/Z ขวา/หน้า/บน |
| 29 ~ 31 |
Hbar |
S1*3 |
1e-2 |
±8388608 |
mbar |
บารอมิเตอร์ |
| 32 |
ฟันธง |
ยู1 |
|
|
|
BIT1-เครื่องหมายแม่เหล็กที่ใช้ได้ 1- ใช้ได้
BIT2-Barometric Valid Flag 1- ถูกต้อง
BIT3- GPS_exist
ข้อมูล GPS ออกไปหรือไม่
0- ไม่มีข้อมูล GPS
1- มีข้อมูล GPS
ข้อมูล BIT4-GPS ฟันธงที่ถูกต้อง 1- ถูกต้อง
BIT5-8 เซลล์ฟิลล์
|
| 33 ~ 40 |
ระบบคําที่เก็บไว้ |
|
|
|
|
|
| 41~49 |
GPS_Vele/N/U |
S3*3 |
1e-4 |
±8388608 |
m/s |
GPS ทิศตะวันออก / ทิศเหนือ / ความเร็วบนท้องฟ้า |
| 50 ~ 60 |
GPS_Lon/Lan |
S2*4 |
1e-7 |
± 2147483648 |
° |
GPS LongITude/GPS LatITude |
| GPS_Hmsl |
S1*3 |
1e-2 |
±8388608 |
m |
GPS AltITude |
| 61 ~ 62 |
GPS_Headmot |
S1*2 |
1e-2 8 |
± 3276 |
° |
สาย GPS |
| 63 |
สถานะ GPS |
ยู1 |
|
|
|
BIT1~4-จํานวนดาวเทียมตั้งตําแหน่ง GPS (สูงสุด 15)
BIT5 -เครื่องหมายตั้งตําแหน่ง GPS 1 มีผล
BIT6~8- ประเภทการตั้งตําแหน่ง GPS
GPS_ Fixtype
0x00=ไม่แก้ไข
0x01=เฉพาะการคํานวณ
0x02=2d แก้ไข
0x03=3d-Fix
0x04=Gnss + การรับข้อมูลที่ตายรวมกัน
0x05=เวลาเพียงแก้ไข
|
| 64 ~ 65 |
GPS_Pdop |
ยู2 |
1e-2 |
|
|
|
| 66 ~ 71 |
Ins_Att |
S2*2 |
1e-2 |
± 32768 |
° |
Ptich ± 90° โรลล์ ± 180° |
| S1*2 |
655.36 |
° |
โกบ ± 180° |
| 72 ~ 80 |
Vn |
S3*3 |
1e-4 |
±8388608 |
m/s |
Vel_E/N/U |
| 81 ~ 89 |
โพส |
S2*4 |
1e-7 |
± 2147483648 |
° |
ความยาว/ความกว้าง |
| S1*3 |
1e-2 |
±8388608 |
m |
AltITude |
| 92 |
รูปแบบและฉาก |
ยู1 |
|
|
|
BIT1~4- รูปแบบการทํางาน
Align=1; Ins=2; Ahrs=3; Vg=4
BIT5~8- กิจกรรม
1=บนเครื่อง;2=ภายใน;3=บนเครื่อง 4=ปีกคง;5=โรเตอร์
|
| 93 ~ 96 |
เงินสํารอง |
|
|
|
|
0 เติม |
| 97 ~ 98 |
อุณหภูมิ |
S2 |
1e-2 |
± 32768 |
°C |
|
| 99 |
นับ |
ยู1 |
|
|
|
|
| 100 |
รหัสตรวจสอบ |
|
|
|
|
บวกตัวอักษรทั้งหมดก่อนการตรวจสอบ BIT |
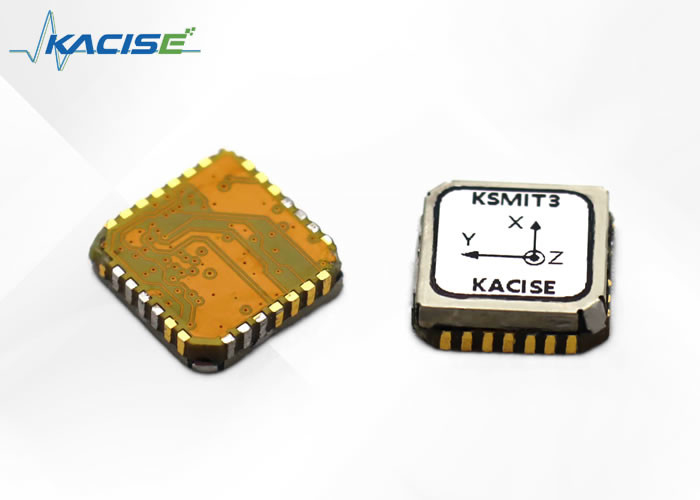
การตั้งค่า pin
รูปที่ 2: การตั้งค่า Pin ของโมดูล KSMIT3 (ภาพด้านบน)
| เลข |
ชื่อ |
ประเภท |
คําอธิบาย |
| 7 |
VDDIO |
พลัง |
ความดันไฟฟ้า DigITal |
| 8 |
GND |
| 23 |
UART_RX |
อินเตอร์เฟซ UART |
การใส่ข้อมูลของตัวรับ |
| 24 |
UART_TX |
อินเตอร์เฟซ UART |
การออกข้อมูลของตัวส่ง |
| 25 |
GND |
| 18 |
AUX_RX A |
อินเตอร์เฟซ GNSS ช่วยเหลือ |
การใส่ข้อมูลของตัวรับจากโมดูล GNSS |
| 19 |
UX_TX |
อินเตอร์เฟซ GNSS ช่วยเหลือ |
การออกข้อมูลของเครื่องส่งไปยังโมดูล GNSS |
| 20 |
SYNC_PPS |
อินเตอร์เฟซ GNSS ช่วยเหลือ |
อัมพวาลต่อวินาทีจากหน่วย GNSS |
การตั้งค่าปารามิเตอร์
ผลิตภัณฑ์ตั้งค่าเป็นสภาพ "output ต่อเนื่อง" เมื่อเปิด และการตั้งค่าปารามิเตอร์ ต้องส่งคําสั่ง "stop output" ก่อนผู้ใช้ต้องเปิดและเริ่มต้นใหม่ เพื่อเปลี่ยนอัตโนมัติไปสู่สภาวะการส่งต่อเนื่อง.
1 การหยุดการออก
การหยุดผลิตคือการสลับภาวะ "ผลิตต่อเนื่อง" ตามปกติในการใช้พลังงาน เป็นภาวะ "การตั้งค่าปารามิเตอร์"
ส่งไปยัง: * PA สเปซ GS01 สเปซ STOP การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ STOP สเปซ 0 การเดินทางกลับ
* PA สเปซ GS01 สเปซ STOP สเปซ 1 การเดินทางกลับสําเร็จ
2 กําหนดกรณีการทํางาน
ผลิตภัณฑ์ต้องสวิตช์ปารามิเตอร์กรองตามกรณีการใช้งานที่แตกต่างกัน รูปแบบการทํางานประกอบด้วย การติดตั้งรถยนต์, ภายใน (โต๊ะสวิง)ด้วยกรณธรรมนูญบนเครื่องสําหรับพลังงาน.
การเปลี่ยนฉากคือการเปลี่ยน "ฉากรถ" ตามปกติ เมื่อเปิดฉากจริง
ส่ง: * สเปซ PA สเปซ GS01 สเปซ SCENES สเปซ 1 การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ SCENES สเปซ 1 สเปซ 0 การเดินทางกลับ
* PA สเปซ GS01 สเปซ SCENES สเปซ 1 สเปซ 1 การเดินทางกลับสําเร็จ
หมายเหตุ: ตัวอักษรที่ระบุลักษณะประกอบด้วย 1 ตัวติดรถยนต์, 2 ตัวติดภายใน, 3 ตัวติดเรือ, 4 ตัวติดปีก, และ 5 ตัว Rotor เป็นตัวเลือก
3 กําหนดอัตรา Baud
อัตราการใช้งานแบบบาวด์โดยกําหนดเองสําหรับการเปิดไฟคือ 230400bps ซึ่งสามารถสวิตช์โดยการส่งคําสั่ง
ส่ง: * สเปซ PA สเปซ GS01 สเปซ BAUD สเปซ 1 การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ BAUD สเปซ 1 สเปซ 0 การเดินทางกลับ
* PA สเปซ GS01 สเปซ BAUD สเปซ 1 สเปซ 1 การเดินทางกลับสําเร็จ
หมายเหตุ: เนื้อหาของตัวอักษรที่ถอดร่องคือ 1-115200bps, 2-230400bps และ 3-460800bps ซึ่งเป็นตัวเลือก
4 กลับตั้งค่าจากโรงงาน
การฟื้นฟูการตั้งค่าโรงงานมีส่วนเกี่ยวข้องกับการตั้งค่าฉากทํางาน, รูปแบบกรอบ, อัตรา baud, ความยืดหยุ่นแม่เหล็ก, และการปรับขนาดสนามแม่เหล็กให้เป็นค่าโดยกําหนด
ส่ง: * PA สเปซ GS01 สเปซ RESET การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ RESET สเปซ 0 การกลับรถล้มเหลว
* PA สเปซ GS01 สเปซ RESET สเปซ 1 การเดินทางกลับสําเร็จ
5 กําหนดมุมลดลมแม่เหล็ก
การลดคลื่นแม่เหล็กแบบตั้งค่าคือ 0 โดยมีแม่เหล็กบวกเหนือตะวันออก และแม่เหล็กลบตะวันตก
ส่ง: * PA สเปซ GS01 สเปซ MDEC สเปซ +/- XX.XX คารถกลับ
ตอบ:
* PA สเปซ GS01 สเปซ MDEC สเปซ 0 การกลับรถล้มเหลว
* PA สเปซ GS01 สเปซ MDEC สเปซ 1 การเดินทางกลับสําเร็จ
หมายเหตุ: หากมุมการลดความเข้มของแม่เหล็กคือ -2.5 องศา สายลวดลายคือ -0250; หากมุมลดความเข้มแม่เหล็กคือ + 1.5 องศา, สายลักษณะลักษณะลักษณะลักษณะลักษณะลักษณะลักษณะลักษณะลักษณะ50.
6 การปรับขนาดสนามแม่เหล็ก
ในการทํางานของเซ็นเซอร์แม่เหล็ก IT จะต้องได้รับผลกระทบจากการแทรกแซงของสนามแม่เหล็กไฟฟ้ารอบ ๆซึ่งอาจนําไปสู่ความเบี่ยงเบนและการบิดเบือนในระดับที่แตกต่างกันของแกน XYZ ความเข้มแข็งของสนามแม่เหล็กที่วัดโดยเซ็นเซอร์แม่เหล็กการปรับขนาดสนามแม่เหล็กคือการชดเชยการขัดแย้งแม่เหล็กอ่อนและแข็ง ผ่านการเรียนรู้ของแวดล้อมสนามแม่เหล็กรอบ ๆ ดังนั้นเราแนะนําอย่างมากว่า การปรับขนาดสนามแม่เหล็ก ควรนําไปใช้หลังจากการติดตั้งแต่ละครั้ง และหลังจากการเปลี่ยนแปลงในสภาพแวดล้อมสนามแม่เหล็ก.
เมื่อดําเนินการปรับขนาดสนามแม่เหล็ก สารขัดขวางที่อยู่รอบ ๆ ควรไม่เปลี่ยนแปลง (เช่นหมุนกับผลิตภัณฑ์) ระหว่างกระบวนการหมุนผลิตภัณฑ์และตําแหน่งสัมพันธ์ของผลิตภัณฑ์การปรับระดับต้องการให้ผู้ใช้งานไม่มีโทรศัพท์มือถือ, การ์ดแม่เหล็ก, กุญแจ, หรือโลหะหรืออุปกรณ์ที่ใช้พลังงานที่สามารถส่งผลต่อสนามแม่เหล็กไฟฟ้าบนร่างกายของพวกเขา
ความสนใจ: ภายในช่วงการรบกวนที่จํากัดเท่านั้น การดําเนินงานการปรับขนาดสนามแม่เหล็กสามารถมีผลการชดเชยระยะของเซ็นเซอร์แม่เหล็กประมาณระหว่างบวกและลบ 1 Gauss, ซึ่งประมาณเป็นสองเท่าของสนามแม่เหล็กภูมิภาคเหนือ หากค่าการขัดขวางสนามแม่เหล็กเกินบวกหรือลบ 0.5 กาวส์, เครื่องวัดแม่เหล็กอาจถึงภาวะความอิ่มซึ่งบกพร่องผลการชําระเงินเยียวยา. เมื่อการปรับผิดพลาด, IT แสดงว่าปัญหาเกิดขึ้น
การปรับขนาด 2 มิติ
หมายเหตุ: เมื่อผลิตภัณฑ์ไม่สามารถหมุนใน 3 มิติ, การปรับขนาด 2 มิติสามารถใช้ได้.การปรับขนาด 2 มิติสามารถทําสําเร็จผ่านอินเตอร์เฟซหรือสายพานลําดับ โดยการออกคําสั่ง.
1. เริ่มการปรับ: ก่อนการปรับผู้ใช้
ส่ง: * PA สเปซ GS01 สเปซ MCAL สเปซ START การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ MCAL สเปซ START สเปซ 0 การเดินทางกลับ
* PA สเปซ GS01 สเปซ MCAL สเปซ START สเปซ 1 การเดินทางกลับสําเร็จ
2 หยุด calibration: เริ่มหมุนแนวราบสําหรับมากกว่า 2 รอบ, และส่งหลังจากการเสร็จสิ้น
ส่ง: * สเปซ PA สเปซ GS01 สเปซ MCAL สเปซ END การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ MCAL สเปซ 0 การกลับรถล้มเหลว
* PA สเปซ GS01 สเปซ MCAL สเปซ 1 สเปซ X: x.xx สเปซ Y: y.yy การเดินทางกลับสําเร็จ
หมายเหตุ: การคืนผลการปรับขนาด 0.90-1 แสดงผลการปรับขนาดที่ดี ขณะที่>1.1 หรือ<0.9 แสดงผลการปรับขนาดที่ไม่ดี
3. เก็บผลการปรับ: หลังจากการปรับใช้งานของผู้ใช้, ตัดสินใจว่าจะเก็บตามผลการปรับ
ส่ง: * สเปซ PA สเปซ GS01 สเปซ MCAL สเปซ SAVE การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ MCAL สเปซ SAVE สเปซ 0 คันกลับ
* PA สเปซ GS01 สเปซ MCAL สเปซ SAVE สเปซ 1 การเดินทางกลับสําเร็จ
4. ผลการปรับระดับที่ชัดเจน: หลังจากการปรับระดับ ผู้ใช้ตัดสินใจว่าจะปรับระดับหรือไม่ตามผลการปรับระดับ
ส่ง: * PA สเปซ GS01 สเปซ MCAL สเปซ CLEAR การเดินทางกลับ
ตอบ:
* PA สเปซ GS01 สเปซ MCAL สเปซ CLEAR สเปซ 0 การเดินทางกลับ
* PA สเปซ GS01 สเปซ MCAL สเปซ CLEAR สเปซ 1 การเดินทางกลับสําเร็จ
Aการใช้งาน
เครื่องบินขนาดเล็ก
• เครื่องบินไร้คนขับ
• เครื่องบินไร้คนขับแบบวีดีโอ
• UAVs เกษตร
เครื่องจักร
• Satcom ใน การเคลื่อนไหว (SotM)
• เครื่องจักรกลก่อสร้าง
• การติดตามเรือ
หุ่นยนต์
• การเกษตรอิสระ
• อัตโนมัติคลังสินค้า
• แขนหุ่นยนต์
การใช้งานอื่น ๆ
• เครื่องมือมือ
• การนําทางของคนเดิน
• VR/AR และ HMD
•ช่วยการเดินเรือ
การสนับสนุนและบริการ:
ยินดีต้อนรับสู่การสนับสนุนและบริการทางเทคนิคของเราสําหรับเซ็นเซอร์จีโรสโกปี ทีมงานที่มุ่งมั่นของเราอยู่ที่นี่เพื่อช่วยคุณกับปัญหาทางเทคนิคหรือคําถามที่คุณอาจมีเกี่ยวกับการใช้งาน, การติดตั้ง,หรือการบํารุงรักษาเซ็นเซอร์จิโรสโกปของคุณเรามุ่งมั่นที่จะให้การสนับสนุนที่ดีที่สุดให้คุณ เพื่อให้แน่ใจว่าผลิตภัณฑ์ของคุณทํางานได้อย่างสมบูรณ์แบบ
การสนับสนุนของเราประกอบด้วยเอกสารสินค้ารายละเอียด คําถามที่ถามบ่อย (FAQ) และคู่มือแก้ไขปัญหา ที่ถูกออกแบบมาเพื่อช่วยคุณแก้ไขปัญหาทั่วไปอย่างรวดเร็วสําหรับปัญหาที่ซับซ้อนหรือเฉพาะเจาะจงทีมงานสนับสนุนทางเทคนิคของเรา พร้อมที่จะให้ความช่วยเหลือตามความต้องการ
หากคุณต้องการความช่วยเหลือเพิ่มเติม please refer to the 'Contact Us' section of our website (contact information excluded as per request) where you can find additional resources and support channels to get in touch with our professional technical support team.
ขอบคุณสําหรับการเลือก Electronic Gyroscope Sensor ของเรา เรายินดีที่จะบริการคุณและรับประกันความสําเร็จของโครงการของคุณ
การบรรจุและการขนส่ง
เซ็นเซอร์จีโรสโกปอิเล็กทรอนิกส์ถูกบรรจุไว้ในถุงกันสแตตติก เพื่อให้คุ้มกันต่อการหลอดไฟฟ้า (ESD)ผงผสมความหนาแน่นสูงผสมผสมนี้ถูกวางไว้ในเครื่องยนต์ที่ทนทานกล่องกระดาษแบรนด์ที่ป้องกันเซ็นเซอร์จากปัจจัยสิ่งแวดล้อมและความเสียหายที่อาจเกิดขึ้นระหว่างการขนส่ง.
ด้านนอกของกล่องมีเครื่องหมายที่ชัดเจน มีชื่อสินค้า คําแนะนําการใช้งาน และบาร์โค้ดเพื่อการติดตามง่ายให้ความปลอดภัยเพิ่มเติม.
สําหรับการจัดส่ง เครื่องรับสัญญาณกลมกลมกลมทางอิเล็กทรอนิกส์ จะถูกส่งผ่านบริการส่งสินค้าที่เชื่อถือได้ เพื่อให้การจัดส่งทันเวลาและปลอดภัยให้ความสงบใจและคุ้มครองการลงทุนของคุณข้อมูลการติดตามถูกให้บริการทันทีที่พัสดุถูกส่งไป ทําให้สามารถติดตามการจัดส่งได้ในเวลาจริง จนกว่ามันจะถึงจุดหมายหมาย

 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski